Pegasus-Mini Simulation
ROS Gazebo is a simulation tool that puts your Pegasus-Mini in a simulated environment in order to test to various things such as algorithms and other software design features. Ensure that you have been through Getting Started with ROS and installed all required dependencies.
Run the Pegasus-Mini Gazebo launch file by running the following command:
roslaunch pegasus_simulation pegasus_gazebo.launch
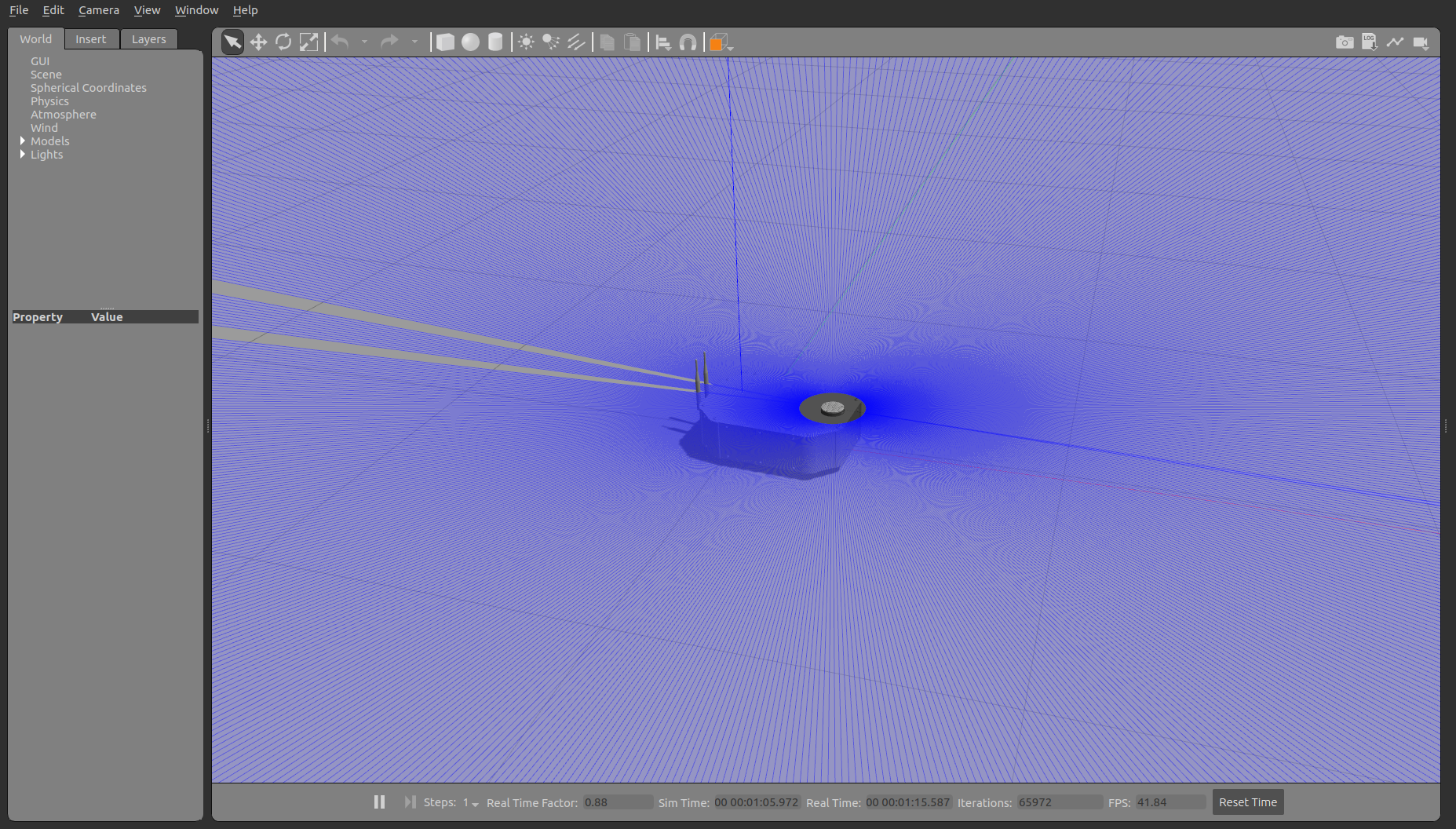
The Gazebo tool will launch and spawn your Pegasus-Mini into the simulation with a simulated Lidar Scanner.
2. In order to move the Pegasus-Mini around within the world you can use the ROS teleop_twist_keyboard package as described here Remote Control by opening a separate terminal and running the following command:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py